针对传统遗传算法进行路径规划时仍存在的较多问题,采用随机法产生初始种群时不可行路径所占比重较大的问题提出基于Cost-Gain算法的避障策略,然后在MATLAB仿真平台上分别对传统遗传算法和改进遗传算
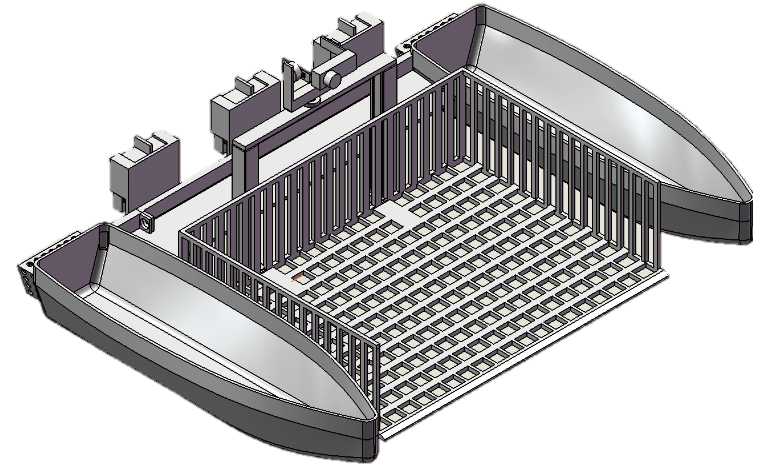
基于遍历算法的智能湖泊环境监测及净化装置*
设计了一款基于遍历算法的智能湖泊环境监测及净化装置,该装置采用全局路径规划和局部路径规划的方法来实现各个功能,全局路径规划通过GPS定位来实现,主要是确定航行的路线和水质的采集,局部路径规划通过摄像头

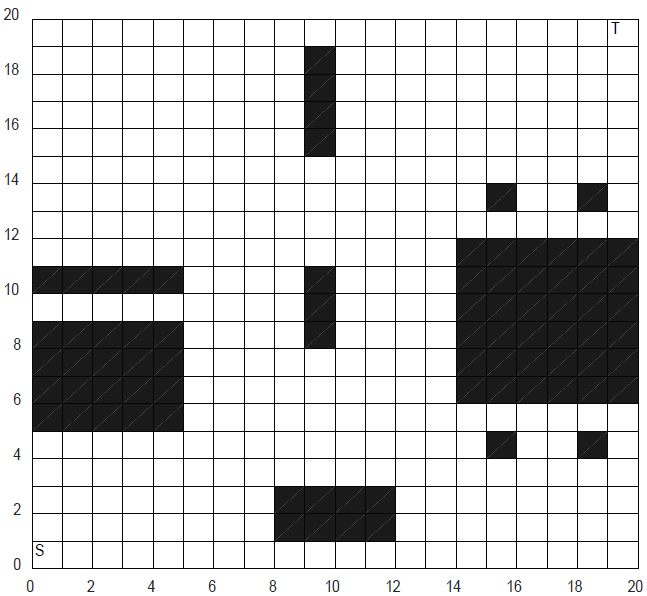
针对传统遗传算法进行路径规划时仍存在的较多问题,采用随机法产生初始种群时不可行路径所占比重较大的问题提出基于Cost-Gain算法的避障策略,然后在MATLAB仿真平台上分别对传统遗传算法和改进遗传算
设计了一款基于遍历算法的智能湖泊环境监测及净化装置,该装置采用全局路径规划和局部路径规划的方法来实现各个功能,全局路径规划通过GPS定位来实现,主要是确定航行的路线和水质的采集,局部路径规划通过摄像头