
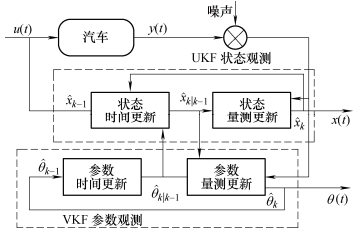
自动驾驶的完成需要设计合适的线控转向系统。为了能够对车辆动力惯性参数开展非线性评价,开发了一种分布结构驱动力电动汽车双无迹卡尔曼滤波(Dual unscented Kalman filter, DUK
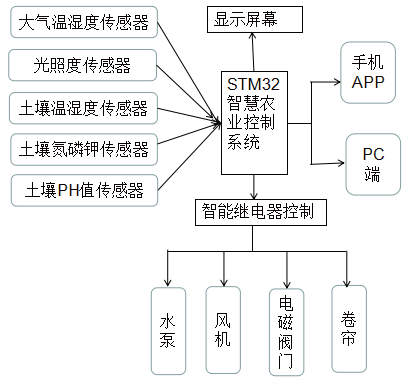
基于STM32的智慧农业监测系统设计与实现
农作物的生长状况与其周边环境是息息相关的,对农田环境、作物生长状态、气象数据等进行实时监测和分析,及时调整有关环境参数,为农业生产提供科学化、精准化的管理手段,有力促进农作物增产增收。本文设计一种基于

基于STM32微控制器的沙漠植树车设计与实现
为了阻止土地荒漠化扩散,优化传统种植方式,减少人力付出,实现沙漠中植树自动化精准栽种。研发基于STM32微控制器的沙漠植树车。在使用STM32微控制器的同时,配合云端、esp8266无线传输模块,使其
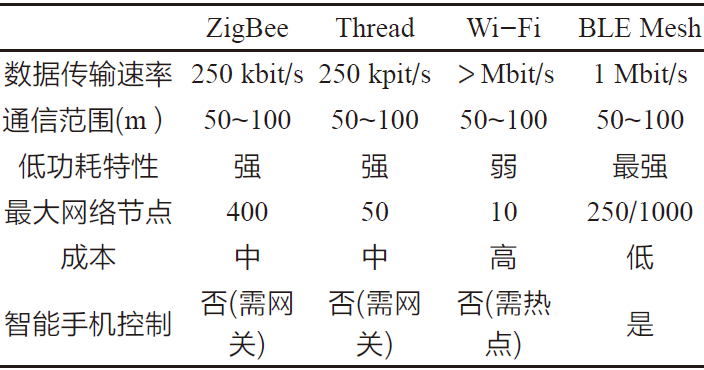
基于微能量采集技术的无源物联网研究与应用
基于微能量采集技术设计一款无源、无线智能开关。微能量(光能)采集使用E-PEAS的 AEM1094方案,蓝牙使用凌思微的LE5010方案。实验证明本文设计的无源、无线智能开关具备环境部署的便利性也拥有
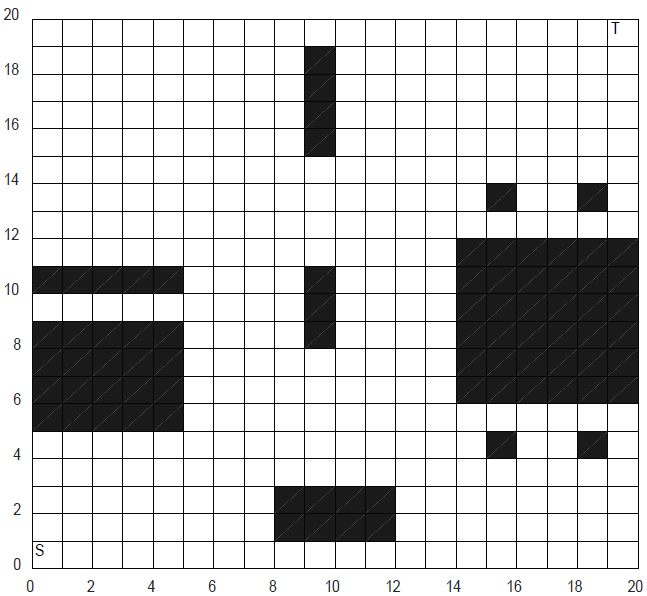
基于改进遗传算法的移动机器人路径规划研究
针对传统遗传算法进行路径规划时仍存在的较多问题,采用随机法产生初始种群时不可行路径所占比重较大的问题提出基于Cost-Gain算法的避障策略,然后在MATLAB仿真平台上分别对传统遗传算法和改进遗传算