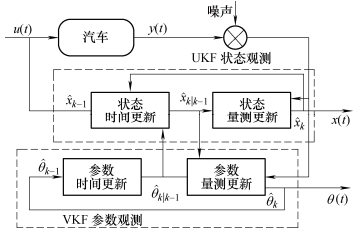
基于双无迹卡尔曼滤波的自动驾驶状态惯性监测 2023-08-22 行业动态 作者 自动驾驶的完成需要设计合适的线控转向系统。为了能够对车辆动力惯性参数开展非线性评价,开发了一种分布结构驱动力电动汽车双无迹卡尔曼滤波(Dual unscented Kalman filter, DUK 查看详细